矿井提升机的变频调速改造
一、概况
矿井提升机是煤矿,有色金属矿生产过程中的重要设备。提升机的安全、可靠运行,直接关系到企业的生产状况和经济效益。某煤矿井下采煤,采好的煤通过斜井用提升机将煤车拖到地面上来。煤车厢与火车的运货车厢类似,只不过高度和体积小一些。在井口有一绞车提升机,由电机经减速器带动卷筒旋转,钢丝绳在卷筒上缠绕数周,其两端分别挂上一列煤车车厢,在电机的驱动下将装满煤的一列车从斜井拖上来,同时把一列空车从斜井放下去,空车起着平衡负载的作用,任何时候总有一列重车上行,不会出现空行程,电机总是处于电动状态。这种拖动系统要求电机频繁的正、反转起动,减速制动,而且电机的转速一定规律变化。斜井提升机的机械结构示意如图1所示。斜井提升机的动力由绕线式电机提供,采用转子串电阻调速。提升机的基本参数是:电机功率55kW,卷筒直径1200mm,减速器减速比24︰1,最高运行速度2.5m/s,钢丝绳长度为120m。
目前,大多数中、小型矿井采用斜井绞车提升,传统斜井提升机普遍采用交流绕线式电机串电阻调速系统,电阻的投切用继电器—交流接触器控制。这种控制系统由于调速过程中交流接触器动作频繁,设备运行的时间较长,交流接触器主触头易氧化,引发设备故障。另外,提升机在减速和爬行阶段的速度控制性能较差,经常会造成停车位置不准确。提升机频繁的起动﹑调速和制动,在转子外电路所串电阻的上产生相当大的功耗。这种交流绕线式电机串电阻调速系统属于有级调速,调速的平滑性差;低速时机械特性较软,静差率较大;电阻上消耗的转差功率大,节能较差;起动过程和调速换挡过程中电流冲击大;中高速运行震动大,安全性较差。

二、改造方案
为克服传统交流绕线式电机串电阻调速系统的缺点,采用变频调速技术改造提升机,可以实现全频率(0~50Hz)范围内的恒转矩控制。对再生能量的处理,可采用价格低廉的能耗制动方案或节能更加显著的回馈制动方案。为安全性考虑,液压机械制动需要保留,并在设计过程中对液压机械制动和变频器的制动加以整合。矿井提升机变频调速方案如图2所示:
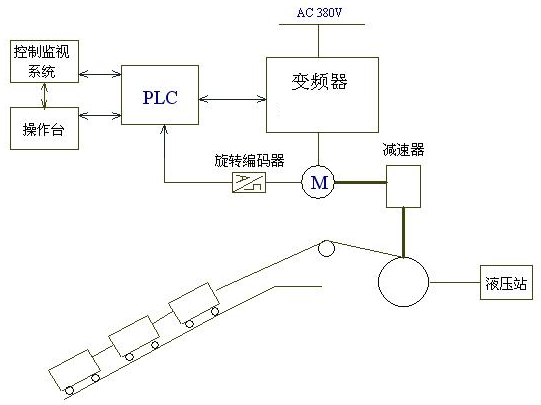
图2 矿井提升机变频调速方案
考虑到绕线式电动机比鼠笼式电动机的力矩大,且过载能力强,所以仍用原来的4极160kW绕线式电机,在用变频器驱动时需将转子三根引出线短接。提升机在运行过程中,井下和井口必须用信号进行联络,信号未经确认,提升机不能运行。为显示运行时车厢的位置,使用E6C3-CS5C 40P旋转编码器,即电机旋转1圈旋转编码器产生40个脉冲,这样每两个脉冲对应车厢走过的距离为1200。则与实际距离的误差值为4-3.9=0.027mm,卷筒运行一圈误差为0.027,已知钢丝绳长度为120m,如果两个脉冲对应车厢走过的距离用近似值3.9mm计算,120m全程误差为120000。再考虑到实际检测过程中有一个脉冲的误差,则最大的误差在821mm~829mm之间,对于数十米长的车厢来说误差范围不到1米,精度足够。因此,用计数器实时统计旋转编码器发出的脉冲个数,则可计算出车厢的位置并用显示器显示。另外一个问题是计数过程中有无累计误差存在?实际检测时,在一个提升过程开始前,首先将计数器复位,第一个重车厢经过某个位置时,打开计数器计数,车厢在斜井中的位置以此点为基准计算,没有累计误差。在操作台上,用SWP-AC系列智能型交流电压/电流数字仪表显示交流电压和电机工作电流,用智能型数字仪表显示提升次数和车厢的位置。
三、方案实施
斜井提升负载是典型的摩檫性负载,即恒转矩特性负载。重车上行时,电机的电磁转矩必须克服负载阻转矩,起动时还要克服一定的静摩檫力矩,电机处于电动工作状态,且工作于第一象限。在重车减速时,虽然重车在斜井面上有一向下的分力,但重车的减速时间较短,电机仍会处于再生状态,工作于第二象限。当另一列重车上行时,电机处于反向电动状态,工作在第三象限和第四象限。另外,有占总运行时间10%的时候单独运送工具或器材到井下时,电机纯粹处于第二或第四象限,此时电机长时间处于再生发电状态,需要进行有效的制动。用能耗制动方式必将消耗大量的电能;用回馈制动方式,可节省这部分电能。但是,回馈制动单元的价格较高,考虑到单独运送工具或器材到井下仅占总运行时间的10%,为此选用价格低廉的能耗制动单元加能耗电阻的制动方案。
提升机的负载特性为恒转矩位能负载,起动力矩较大,选用变频器时适当地留有余量,因此选用 185KW变频器。由于提升机电机绝大部分时间都处于电动状态,仅在少数时间有再生能量产生,变频器接入一制动单元和制动电阻,就可以满足重车下行时的再生制动,实现平稳的下行。井口还有一个液压机械制动器,类似电磁抱闸,此制动器用于重车静止时的制动,特别是重车停在斜井的斜坡上,必须有液压机械制动器制动。液压机械制动器受PLC和变频器共同控制,机械制动是否制动受变频器频率到达端口的控制,起动时当变频器的输出频率达到设定值,例如0.2Hz,变频器KB、KA端口输出信号,表示电机转矩已足够大,打开液压机械制动器,重车可上行;减速过程中,当变频器的频率下降到0.2Hz时,表示电机转矩已较小,液压机械制动器制动停车。紧急情况时,按下紧急停车按钮,变频器能耗制动和液压机械制动器同时起作用,使提升机在尽量短的时间内停车。
提升机传统的操作方式为,操作工人坐在煤矿井口操作台前,手握操纵杆控制电机正﹑反转个三挡速度。为适应操作工人这种操作方式,变频器采用多段速度设置,X1、X2设为正反转,X3、X4、X5可设挡速度。
四、提升机工作过程
提升机经过变频调速改造后,系统的工作过程阿盛大的变化。操纵杆控制电机无极调速。不管电机正转还是反转,都是从矿井中将煤拖到地面上来,电机工作在正转和反转电动状态,只有在满载拖车快接近井口时,需要减速并制动,提升机工作时序图如图4所示:

图4 提升机工作时序图
图4中,提升机无论正转、反转其工作过程是相同的,都有起动、加速、中速运行、稳定运行、减速、低速运行、制动停车等七个阶段。每提升一次运行的时间,与系统的运行速度,加速度及斜井的深度有关,各段加速度的大小,根据工艺情况确定,运行的时间由操作工人根据现场的状况自定。图中各个阶段的工作情况说明如下:
(1)第一阶段0~t1:串车车厢在井底工作面装满煤后,发一个联络信号给井口提升机操作工人,操作工人在回复一个信号到井底,然后开机提升。重车从井底开始上行,空车同时在井口车场位置开始下行。
(2)第二阶段 t1~t2:重车起动后,加速到变频器的频率为f2速度运行,中速运行的时间较短,只是一过渡段,加速时间内设备如果没有问题,立即再加速到正常运行速度。
(3)第三阶段 t2~t3:再加速段。
(4)第四阶段 t3~t4:重车以变频器频率为f3的最大速度稳定运行,一般,这段过程最长。
(5)第五阶段 t4~t5:操作工人看到重车快到井口时立即减速,如减速时间设置较短时,变频器制动单元和制动电阻起作用,不致因减速过快跳闸。
(6)第六阶段 t5~t6:重车减速到低速以变频器频率为f1速度低速爬行,便于在规定的位置停车。
(7)第七阶段 t6~t7:快到停车位置时,变频器立即停车,重车减速到零,操作工人发一个联络信号到井下,整个提升过程结束。
以上为人工操作程序,也可按PLC自动操作程序工作。
图中加速和减速段的时间均在变频器上设置。
五、结语
绕线式电机转子串电阻调速,电阻上消耗大量的转差功率,速度越低,消耗的转差功率越大。使用变频调速,是一种不耗能的高效的调速方式。提升机绝大部分时间都处在电动状态,节能十分显著,经测算节能30%以上、取得了很好的经济效益。另外,提升机变频调速后,系统运行的稳定性和安全性得到大大的提高,减少了运行故障和停工工时,节省了人力和物力,提高了运煤能力,间接的经济效益也很可观。
